|
Szczegóły Produktu:
|
| Rozmiar komory: | 750(dł.)*500(szer.)*550(wys.) mm | Ilość ramienia robota: | 1 szt |
|---|---|---|---|
| Rytm prania: | 15~30 min | Wymiar maszyny: | Około 5800x2400x2600mm, rzeczywisty rozmiar ma pierwszeństwo |
| Zapotrzebowanie mocy na sprzęt: | 380 V ± 10%/50 Hz, 3 fazy | Moc maszyny czyszczącej: | ≈42kW |
| High Light: | 5 etapów automatyczna myjka ultradźwiękowa,automatyczna myjka ultradźwiękowa ramienia robota,automatyczna myjka ultradźwiękowa komory 200L |
||
I.Przegląd projektu
1,Nazwa Projektu: 4-stopniowa automatyczna ultradźwiękowa maszyna czyszcząca
2, wymagania projektowe:W oparciu o informacje o produkcie i wymagania techniczne dotyczące czyszczenia dostarczone przez klientów, na podstawie spełnienia umowy technicznej i wymagań produkcyjnych, zapewnimy klientom dojrzałe, niezawodne, stabilne i doskonałe działanie automatycznego sprzętu czyszczącego, aby spełnić wymagania dotyczące użytkowania, i zapewnić klientom z pełną obsługą posprzedażną i korzystaniem ze wskazówek technicznych. W tym projekcie Strona B (Sprzedający) będzie odpowiedzialna za zaprojektowanie sprzętu, produkcję, uruchomienie, jakość i obsługę posprzedażną, a budowa projektu zostanie zakończona zgodnie z umowa zawarta z klientem przed sprzedażą.
II.Szczegóły wyposażenia
1, przegląd wyposażenia:
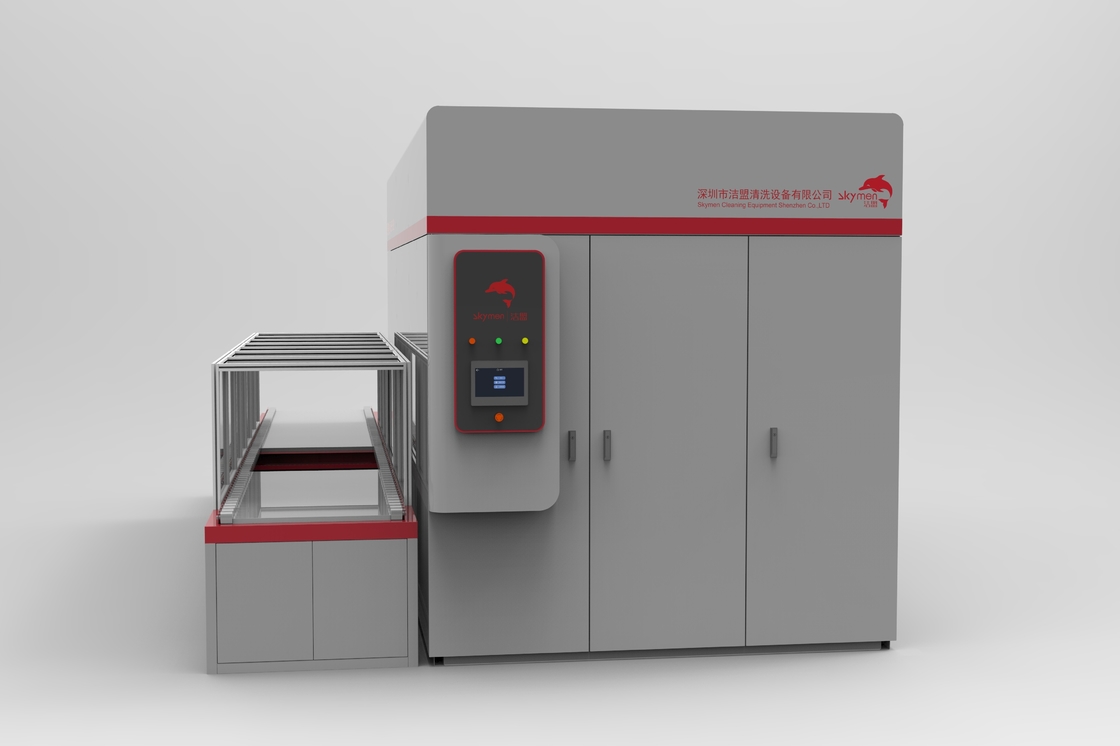
1.1 W pełni automatyczna maszyna czyszcząca model JTM-4096SD to wysoce inteligentny i precyzyjny sprzęt czyszczący zaprojektowany i wyprodukowany dla produktów klientów;wykorzystuje głównie czyszczenie ultradźwiękowe do czyszczenia, płukania i suszenia produktów klientów;Aby czystość detalu klienta mogła sprostać wymaganiom użytkowania, Sprzęt posiada 4 komory czyszczące, stół załadunkowy i rozładunkowy.Wyposażenie uzupełniane jest automatycznie, bez konieczności obecności personelu na dyżurze, aw razie potrzeby można również przeprowadzić interwencję ręczną.
1.2 Model to automatyczna maszyna czyszcząca JTM-4096SD głównie przez:
1 system występowania ultradźwięków (w tym generatory, przetworniki),
2 układ trzymania (zbiornik czyszczący),
3 systemy ogrzewania,
4 system kontroli poziomu cieczy,
5 System pozycjonowania indukcyjnego
6 system sterowania PLC,
7 System ramienia robota.
8 System zanurzania/mieszania koszy dla całej komory czyszczącej
Pomiędzy nimi,
1 Wstrząs fizyczny generowany przez system ultradźwiękowy jest najważniejszym sposobem czyszczenia;
3 System grzewczy ma wykrywać temperaturę ogrzewania za pomocą sondy temperatury o wysokiej precyzji, aby zrealizować kontrolę start-stop urządzenia grzewczego;
4 System kontroli poziomu to indukcja w czasie rzeczywistym ilości roztworu czyszczącego w zbiorniku w celu realizacji kontroli ilości roztworu czyszczącego;
5 System pozycjonowania indukcyjnego pomaga w precyzyjnym pozycjonowaniu uchwytu mechanicznego w celu poprawy dokładności i skuteczności chwytania;
6 system sterowania PLC to proces uruchamiania i zatrzymywania oraz czyszczenia, a także zgodnie z rzeczywistą sytuacją procesu czyszczenia w celu przygotowania lub interwencji ręcznej;
7 System ramienia robota to skuteczny sposób przenoszenia i płynnego transportu produktów do następnego procesu czyszczenia
2,Podstawowe parametry sprzętu
| 2.1 Informacje dotyczące czyszczenia części | Klient zapewnia |
| 2.2 Wielkość komory |
Rozmiar zbiornika: 750 (L) * 500 (W) * 550 (H) mm Rozmiar kosza: 650 (dł.) * 400 (szer.) * 450 (wys.) mm Materiał: SUS304 |
| 2.4 Wymagany rozmiar drutu | 25 kwadratowy drut aluminiowy lub 16 kwadratowy drut miedziany |
| 2.5 Moc maszyny czyszczącej | ≈42kW |
| 2.6 Liczba ramion robota | 1 szt |
| 2.7 Uderzenie w pranie | 15~30 min |
| 2.8 Wymiary maszyny | Około 5800x2400x2600mm, przeważa rzeczywisty rozmiar |
| 2.9 Zapotrzebowanie na moc urządzeń | 380V±10%/50Hz,3 fazy |
| 2.11 Zdalne sterowanie | Problem z oprogramowaniem, który powoduje problemy z wydajnością, powinien być rozwiązany zdalnie na urządzeniu przez inżyniera Skymen |
3,Proces pracy:
3.1 Produkty do prania:???
3.2 Proces czyszczenia:
Ładowanie
→ 1 czyszczenie ultradźwiękowe przez 15 minut (rozpuszczalnik: mydło w płynie)
→ 2 Płukanie ultradźwiękowe przez 5 minut (rozpuszczalnik: woda dejonizowana)
→3 Płukanie gorącą wodą przez 5 minut (rozpuszczalnik: woda dejonizowana)
→4 Płukanie gorącą wodą przez 5 minut (rozpuszczalnik: woda dejonizowana)
Rozładunek
3.3 Rodzaj środka czyszczącego: rozpuszczalniki organiczne, woda dejonizowana
3.4 Opis konfiguracji procesu czyszczenia:
| Nie. | płyn czyszczący | Metoda czyszczenia | ultradźwiękowy | obiekty pomocnicze | moc grzewcza |
| 1 | Środek myjący | czyszczenie ultradźwiękowe | 40 kHz/2,4 kW | Mieszadło do koszy / zanurzanie | 6kW |
| 2 | Woda dejonizowana | płukanie ultradźwiękowe | 40 kHz/2,4 kW | Mieszadło do koszy / zanurzanie | 6kW |
| 3 | Woda dejonizowana | Płukanie gorącą wodą | / | Mieszadło do koszy / zanurzanie | 6kW |
| 4 | Woda dejonizowana | Płukanie gorącą wodą | / | Mieszadło do koszy / zanurzanie | 6kW |
4.1 Czyszczenie ultradźwiękowe
| Nie. | 1. zbiornik | |
| Struktura | Rozmiar zbiornika | 750x500x550mm |
| Kosz | 650x400x450mm | |
| Materiał zbiornika | AISI304, grubość 2mm | |
| System ultradźwiękowy | Transduktor | 48-częściowy przetwornik ultradźwiękowy, całkowita moc ultradźwiękowa wynosi 2,4 kW, a moc jest regulowana w sposób ciągły |
| Generator | Importowana płyta sterowania przemiataniem IGBT z jednolitym wyjściem ultradźwiękowym, mocą wyjściową z wyświetlaczem fotoelektrycznym i wyświetlaczem prądu | |
| System grzewczy | kontrola temperatury | Cyfrowy wyświetlacz, zakres regulacji temperatury RT-90℃ |
| moc grzewcza | Umieść rurę grzewczą ze stali nierdzewnej o mocy 6kW wewnątrz zbiornika | |
4.2 Płukanie ultradźwiękowe
| Nie. | 2. zbiornik | |
| Struktura | Rozmiar zbiornika | 750x500x550mm |
| Kosz | 650x400x450mm | |
| Materiał zbiornika | AISI304, grubość 2mm | |
| System ultradźwiękowy | Transduktor | 48-częściowy przetwornik ultradźwiękowy, całkowita moc ultradźwiękowa wynosi 2,4 kW, a moc jest regulowana w sposób ciągły |
| Generator | Importowana płyta sterowania przemiataniem IGBT z jednolitym wyjściem ultradźwiękowym, mocą wyjściową z wyświetlaczem fotoelektrycznym i wyświetlaczem prądu | |
| System grzewczy | kontrola temperatury | Cyfrowy wyświetlacz, zakres regulacji temperatury RT-90℃ |
| moc grzewcza | Umieść rurę grzewczą ze stali nierdzewnej o mocy 6kW wewnątrz zbiornika | |
4.3 Płukanie gorącą wodą
| Nie. | trzeci zbiornik | |
| Struktura | Rozmiar zbiornika | 750x500x550mm |
| Kosz | 650x400x450mm | |
| Materiał zbiornika | AISI304, grubość 2mm | |
| System grzewczy | kontrola temperatury | Cyfrowy wyświetlacz, zakres regulacji temperatury RT-90℃ |
| moc grzewcza | Umieść rurę grzewczą ze stali nierdzewnej o mocy 6kW wewnątrz zbiornika | |
4.4 Płukanie gorącą wodą
| Nie. | 4.zbiornik | |
| Struktura | Rozmiar zbiornika | 750x500x550mm |
| Kosz | 650x400x450mm | |
| Materiał zbiornika | AISI304, grubość 2mm | |
| System grzewczy | kontrola temperatury | Cyfrowy wyświetlacz, zakres regulacji temperatury RT-90℃ |
| moc grzewcza | Umieść rurę grzewczą ze stali nierdzewnej o mocy 6kW wewnątrz zbiornika | |
![]()
5, główna konstrukcja mechaniczna
5.1 Ramię robota
| Ilość | 1 zestaw | |
| Struktura | Struktura ramienia robota to belka jednoramienna, która jest stabilna w działaniu, dokładna w pozycjonowaniu, duża nośność, duża elastyczność i szybkie podnoszenie. | |
| sterowanie elektryczne |
▶Ramię robota sterowane jest za pomocą programowalnego sterownika oraz wyłączników zbliżeniowych i indukcyjnych w celu automatycznego zakończenia procesu czyszczenia;rytm czyszczenia jest regulowany, a proces operacyjny to regulacja prędkości o zmiennej częstotliwości, która może osiągnąć miękkie lądowanie i dokładne pozycjonowanie ▶Ustanowione z urządzeniem zabezpieczającym kosz do mycia, gdy w zbiorniku znajduje się kosz, ramię robota nie umieszcza więcej koszy |
|
| Parametry silnika | Podnoszenie | Motoreduktor, moc: 3/4KM, prędkość: 0-7 m/min (parametry projektowane na zamówienie) |
| W ruchu | Silnik serwo, moc: 1 KM, prędkość: 0-7 m/min (parametry projektowane na zamówienie) | |
|
Może osiągnąć Funkcjonować |
▶ Obsługa ręczna; ▶ W pełni automatyczna praca; ▶ System automatycznego resetowania; ▶ Pauza i zatrzymanie awaryjne; ▶Interfejs człowiek-maszyna modyfikuje program; ▶Interfejs człowiek-maszyna dostosowuje parametry procesu; ▶Może zdalnie monitorować i kontrolować działanie sprzętu; ▶Wyświetlanie alarmu awarii HMI. |
|
| nośny | Maks.50 kg | |
5.2 Podwozie ramy maszyny i panel drzwi
| Ilość | 1 zestaw |
| Struktura |
Rama i podwozie całego sprzętu wykonane są ze stali nierdzewnej Przód i tył oraz lewa i prawa strona urządzenia są wyposażone w ozdobne panele drzwi, które składają się głównie ze szczotkowanej stali nierdzewnej i paneli akrylowych.Powierzchnia jest matowa i piękna. Zbiornik dystrybucji wody jest ustawiony na stojaku, a miseczka na nóżki jest ustawiona na dole |
5.3 Uwolnienie powietrza
| Ilość | 1 zestaw |
| materiał | Stal nierdzewna, tworzywa sztuczne PVC |
| miejsce instalacji | Osłonę ssącą można ustawić nad zbiornikiem do czyszczenia rozpuszczalników organicznych i rozpuszczalników rozpuszczalnych w wodzie, który można podłączyć do układu wydechowego klienta, a zawór powietrza można regulować |
5.4 Koszyk
| Ilość | 6szt |
| materiał | AISI 304 |
5.5 Elektryczny układ sterowania
| Ilość | 1 zestaw |
| materiał | Deska ze stali nierdzewnej |
| Struktura |
▶Szafa sterownicza elektryczna znajduje się po lewej stronie pierwszego zbiornika i jest zmontowana z systemem czyszczącym;zainstaluj ekran dotykowy panelu operacyjnego i jednocześnie wyświetlaj stan pracy całej maszyny; ▶ Brzęczyk i sprzęt powinny mieć trójkolorową lampkę kontrolną, alarm dźwiękowy i świetlny w przypadku nieprawidłowej sytuacji; ▶Sterownik PLC, przekaźnik, przełącznik powietrza, transformator i inny obwód sterujący głównego zamówienia jest skonfigurowany w szafce; ▶Układ linii jest schludny i przejrzysty, z wyraźnym numerem linii. |
III.Część zapasowaLista
| Części zamienne | Marka |
| Transduchm | Skymen |
| Generator | Skymen |
| Cylinder | TAC w powietrzu |
| Motoreduktor | Delta |
| Siłownik | Delta |
| Wentylator chłodzący | LOTNIK |
| Podgrzewacz | JIUKOU |
| PLC | Delta |
| Ekran dotykowy | WEINVIEW |
| Cyfrowy regulator temperatury | Omron |
| Wartość elektromagnesu | TAC w powietrzu |
| Zmiana poziomu | Skymen |
| Pprzełącznik termoelektryczny | Omron |
| Capatyczny przełącznik podejścia | Omron |
| podręcznik wlot/wylot wodyWartość | Skymen |
| Wartość Y | Skymen |
| Przycisk zasilania | Delta |
| Przekaźnik | Schneidera |
| Prowadnica liniowa | PMI |
| Rama/Powłoka | Jinshuncheng |
| Czołg | Jinshuncheng |
IV.Dokumenty i części zamiennewysyłane z maszyną
1, Odpowiednie dokumenty techniczne
| Imię | język | Ilość | Uwagi |
| podręcznik | język angielski | 1 | |
| Schemat obwodu | język angielski | 1 | |
| schemat rurociągów | język angielski | 1 | |
| Schemat instalacji wodno-elektrycznej | język angielski | 1 | |
| Instrukcje codziennej konserwacji | język angielski | 1 |
2, części zamienne
| Imię | Ilość |
| rura grzewcza | 4 szt |
Osoba kontaktowa: Miss. Nikki
Tel: 86-755-27094405
Faks: 86-755-27094405